新脚紹介~外偏サーキュラー~
こんばんわ。今年のマシンに使っている特殊比スライダーヘッケンについて記事にしようと思います。スライダーヘッケンの性能向上を目指してかなりいい仕上がりになったので、スライダー脚の新しい考え方として面白いのではないかと思います。
区別の為に”外偏サーキュラー”と呼称することにします。意味は後程。
目次
1、新脚の特徴
2、理論
3、軌道設計(Links)
4、作図設計(CAD)
1、新脚の特徴
基本はスライダーヘッケンなので、そのスライダーヘッケンに対するメリット・デメリットは次のよう
メリット
①機構的なクリアランスを無視できる
これが最大のメリットで、スライダヘッケンはクランクヘッケンと比べて負荷切返し点(詳しくは後述)でスライダー溝のクリアランスによるガタが出ます。このガタは寸法を詰めたりすると少なくなるんですが、製作の手間が増えたりもします。その辺もろもろ解決できるのがストレス無く作れてとてもよいです。走りがとても安定します。
②摩耗に強い(削れても大丈夫
上に付随するメリットで、スライダヘッケンにありがちな使っているとスライダー溝がガバになってきて走ってる感じに力強さが無くなってくる問題が無いです。
③切り返しを優しくできる
スライダーヘッケンに限らず脚機構は脚がレバー軸と最も近づく切り返し点で渋くなりがちですが、スライダー円弧を弄ることで切り返しを緩くできます。
④脚軌道を円に近づけられる
ぶっちゃけこれは4枚脚にしてるからなんですが、通常ヘッケンの脚先の軌道を円軌道に近づけると切り返しは渋くなりやすいです。スライダヘッケンなら特に切り返しは渋くなるので4枚脚であってもおすすめはできませんが、③のスライダー円弧をいじることで切り返しをあまり考えずに脚軌道を攻めることができ効率のいい脚になります。
デメリット
①4枚脚限定
詳しくは後述しますが、この脚はスライダー軌道を弄ることに全てが詰まってるので、歩く分だけでスライダー軌道を全て使ってしまう3枚脚ではできません。4枚脚にすることで余裕のできたスライダー軌道を弄ります。もちろん脚を1枚増やす分以上のメリットがあるのでいいんですが、強いて言うなら3枚脚教の人とかは作れないですね(そんな人がいるかは知らない
②設計がめっちゃダルイ
自分史上一番の作図のダルさです。
スライダヘッケンなら
Links軌道設計(てきとう
↓
CAD肉付け(てきとう
で終わるんですが、外偏サーキュラーだと
Links軌道設計(頭使う
↓
CAD軌道修正(禿げる※頭皮の強度に自信のない人は要注意
↓
CAD肉付け(てきとう
って感じで、特に軌道の修正に悩みます。少なくともスライダヘッケンを一回作った事のある人でないと作図は大変だと思います。なので今回は作図についても0から10まで優しく解説します(できるとは言ってない
2、理論
ー魔術師にとってフーダニットとハウダニットには意味がない…重要なのは”どうしてやったか”だ
ーホワイダニット…
-ある夏の日-

そういえばスライダヘッケンって円弧のどっち側を使ってるか気になりまして

そしたら両方使ってることに気づきまして、こりゃあかんと思い至り

スライダーで考えると、左右対称の脚として中間で当たる溝が変わってるんですね
ここを負荷切替し点なんて呼んどきますけど、スライダヘッケンは円弧溝の都合ちょっとのクリアランスが大きなガタになってます
どうにかガタ無くせないかなー、でも寸法詰めるのは大変だなーと悩んどったんですが

脚を半分にすればそもそも切り替えなくなるやん!天才か!とびっくり世紀の大発明
でも脚の長さ足りないなーっと思ったんで

伸ばしたりましたわ!
溝脚理論-完卍成-
スライダヘッケンに応用する時に「どうせ4枚脚になるし軌道も余る(後述)から脚の切り返しも緩くしとこ」っといじってなんやかんやしたやつ↓

(なんやかんやあって)
完卍成
こんな感じに作られたので「外円のみを使い偏った軌道のサーキュラーヘッケン」で外偏サーキュラーと言います。
つまり負荷の切り返し点を無くそうと思って軌道を弄ったら緩い切り返し(脚)と効率のいい脚が付いてきたみたいな感じです。
ちなみに内円を使う事もできるんですが、そうすると脚がめっちゃでかくなったり脚の切り返しを緩くできなかったりするので、外円を使っています。内円の方が歪みにくいとは思うんですが、それ以外の全ての都合が外円の方が勝っています。
3、軌道設計(Links)
軌道設計に行きますが、ここからが面倒です。(Linksはまだ簡単です)
思い出しながら書きます。
ちなみにLinksの使い方の詳細は下記で見てください
https://signed.bufsiz.jp/Links.html

まずはLinks画面を開きます。
オブジェクト数は4にしといてください(3だと振り角が足りないです)
で、この時点でレバー長さを決めます。スライダヘッケンはクランク半径とスライダ軸に入れるベアリングの寸法とカムの接合の仕方を最初に決めたら、必然と最低限必要なレバー長さが決まるので、ここから始めます。
・クランク半径
自分は経験上最低12㎜必要と感じています。
・スライダ軸
スライダ軸は個人的にはベアリング必須で、軸にΦ6のスペーサーを使い外径は12㎜のベアリングにします。これは使いやすさと強度の問題でこれにしますが、外径10㎜でも大丈夫かも知れません。ちなみにそれ以上肉が薄くなると砕け散ります。
・カムの接続
自分は中心にΦ6の丸スペーサーを軸に使いΦ2.5㎜の軸4本で回転止めにしてますので、
クランク半径+7㎜くらいあれば肉が足ります。↓こんな感じ

上の寸法が決まれば、レバー長さは以下の式で決まります。
レバー長さ = クランク半径×2+接続用の肉厚+ベアリング半径+余裕(2~3㎜)
=12×2 + 7 + 6 + 3 = 40㎜
ざっくりどんな寸法になるかは下の画像を見てください。
これは正しくはレバー長さではなくクランク中心からスライダ軸までの距離なんですが、だいたい同じになります(画像の黄色い線が正しいレバー長さ)
でもレバー長さを先に決める方が作図がしやすいので、この手順がおススメです。

レバー長さまでが決まったら、以下の数値を打ち込みます。
・クランク半径
・レバー長さ
・コンロッド長さ→だいたいクランク半径+1~2㎜
・最適化曲線前幅→100
・最適化曲線後幅→10
・最適化曲線高さ→お好きに(ただしレバー長さ+15㎜くらいが下限)
(最適化曲線前幅・後幅については脚の向きによって逆になります)
そうするとこの画像のようになります。

やべー感じになってますが、これで大丈夫です。
この後脚先が美しい曲線になるようにレバーの軸座標を左下側に持っていきます。

レバーのXとY座標を弄ると脚先がこんな感じになります。美しい。
あとは好きに微調整してください。ただ、実際に作図した時に不都合があったらまたLinksでちょいちょい修正するという感じで戻ってくると思います。慣れです。
この軌道の作成の時点で気を付けるポイントとしては、
・折り返し部分は多少余裕を見ておく

折り返しとは膝を伸ばしたような方です。なんとなく15°以上あればいいかなと思ってます。
逆に切り返しは後々CADで調整できるので考えなくていいです。折り返しは調整できないので変に攻めすぎない方がいいと思います。変な負荷がかかったり、最悪反転して動かなくなるので。
・最適化曲線前幅と後幅
多分ですけど、ここを90にするとちょうど脚の負荷切替し点が無くなると思ってます。自分は余裕を見て100まで詰めてますけど、90~100くらいで弄ってもいいと思います。
前幅を決めたら上下動を見ながら後幅も調整してください。ちなみに自分は上下動は0.5㎜くらいは残してます。
・最適化曲線高さ
自由。脚のサイズは邪魔にならなければ大きい方がいいと思ってます。
・レバーXY座標
フィーリング。いい感じに。
以上、Linksの軌道作成についてはこのくらいです。これをスライダヘッケン化しても一応動くと思いますが、切り返しを調整すると格段に動きが良くなるしスライダヘッケンとしての強みも出せるのでとても良いです。めんどくさいですが。
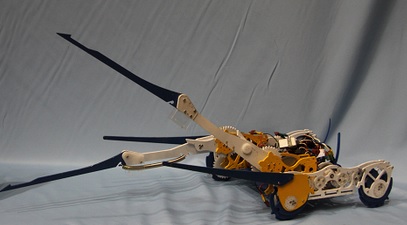
うちのうさぎはぴょんぴょんしないんじゃあ゛〜〜〜(オイルダンパー搭載)

どうもこんばんは。
今年の本大会の機体についてまとめます。恒例なので。
本大会ではMetamolD³という機体名でエントリーしていました。
機体としては以前作った白兎を改良したものですので白兎改とします。
改良点は主に走行性能とメンテ性の改善に重点を置き、機体の重心を前に寄せる事で旋回中心を前よりにして扱いやすくなるようなボディーのレイアウトにしました。
結果としては上手くいき、走行性能は自分史上ぶっちぎりの出来で近年インフレしているかわロボ水準にも遅れはとっていないと思います。
特に今回は脚機構にスライダーヘッケンを採用していますが、特殊比率のヘッケン軌道に切り返しを緩くする工夫を施してかなり効率のいい脚周りになりました(オタク特有の早口)
アームはてきとうです。振り回せてるので多分おっけーです。チョべりぐー。
ざっくり良かったねって感じでここからは細かいところを説明します。ここでしっかり書いておくと来年設計する時に「あーそういえばこんなこと考えて設計してたんだ今年に反映しよう」となるのでブログおススメです。ただのメモより寂しくないですからね。



全体的には丸っこくコンパクトな印象ですね。あと重心高そう(高い)
基本的に重いものはマシン下部に配置してるんですが、脚のモーターのみ高い位置に置いてあるので思ったよりは高くなってしまいました。380モータ4個で300gくらいはありますから、これが思ったより重心に影響してしまいました。次はモーター全部下板ギリギリに配置します。
マシンの丸みは狙ったものじゃなく、脚はスライダヘッケンなので側板が大きくなりがちなのと中心にサスペンションを無理くりつっこんでるのでこれ以上小さくなりませんでした。スライダヘッケンの一番の欠点だと思います。でも可愛いからOKです(良くはない)


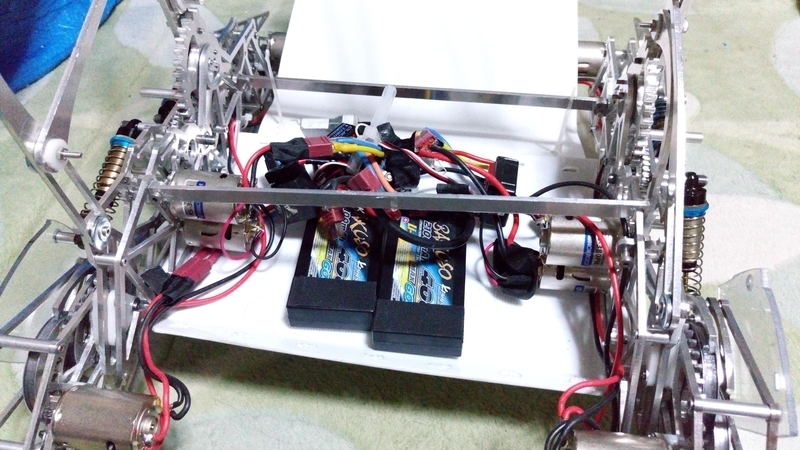
中身はこんな感じです。アームが邪魔過ぎて仕方ないですが、これはコンセプト上仕方なかったんです。
今回はアームのレイアウトを、マシン前部に置いたモーターから減速機がマシンの後ろ方向に伸びて、アームの回転中心がマシンの中心より後ろにあります。これは重量物のモーター
を前側に置いて重心を前に寄せるのと、アームで相手を持ち上げた時に自分が転倒しにくくなる一石二鳥を狙って成功しましたが、電装系を置くスペースが無くなりケツが出てしまいました。そこは思ったより重心が後ろに下がらなかったのと走破性に影響も及ぼしてなかったので良しとします。ただ重心を前に寄せたって言ってもほとんど真ん中なので、次はもうちょっとレイアウトを前にスライドさせます。
というわけでアーム編です

今回アームはワンタッチ換装機構を搭載していて数秒でアームを交換できます。そしてせっかくなので複数のアームを用意しました。
まずはこれ、魂のシャカシャカアーム
常世全てのシールドアームを消し去る為に開発された対シールドアーム用決戦兵器
安定のシールドキラーなんですが、本大会のやつは色々と設計をミスって壊れてしまったので作り直しです。
あとはアームの回転中心を後ろに下げたことによりアーム自体の長さが伸びて慣性モーメントが増えてしまい、色々ついている重いアームは振り回すと自分までコケてしまうという欠点がありました。回転半径を伸ばすことによる明確な欠点だと思います。これは見過ごせないので、アームの軽量化も行う必要があります。あとこれは問題って程でもないですが、本大会の時はアンプのモーターブレーキを全て切っていたせいでアームが自重で下がってきてたのでたまにちょっと上げるという動作が必要でした。他のアームはそういうことは無いので事前にわかっていれば設定を変えておいたのに、当日完成は良くないですね。

The普通のシールドアーム。最初にとりあえず作ってみた。
安定の使いやすさだけど結局のところ操縦技術が無いと勝てないアーム。
守りやすいことは安心感があるけど、対シールドの時の相手も守ってるから決め手に欠ける感がもどかしい。串刺しにしたい。

対横回転用アーム。銘は日大タックル。
丸まって相手にタックルする事しか許されない悲しみのアーム(怒られそう
極力被弾する面積を抑えるのとスタートダッシュするためにアームを下げた状態でスタートできる寸法に抑えた。でも最近の横回転スタートが遅いとか無いからスタートダッシュはいらなかったのでは・・・?感
後は防御に特化したとは言っても攻撃力が流石に無さ過ぎた。天空の剣とは言わないから銅の剣一本くらいの攻撃力は欲しかった。ヒノキの棒では魔王は倒せませんよ王様。
でも丸まった格好がダンゴムシみたいで可愛いのでお気に入り。ちょーだいすき。

今年のアームの換装機構。穴に細めのドライバーを突っ込んでロックを外す構造になっています。そういう構造にした理由はワンタッチにしたときに相手と絡んだりして外れたりする危険を極力減らすための安全策として採用しました。でもやっぱり手で外せるほうが早いし何よりカッコイイです。次は工具なしにします。
そもそもなんでアームにワンタッチの換装機構を搭載しているかというと、ものづくりってそういうものかな?って思ったからです。身の回りにある物を見ても、コピー機のインクや加湿器の水入れなど”替えるとわかっているものはすぐに替えられるようになっている”のが通例です。冷蔵庫のドアがネジを外さないと開かないなんてないです。自分は設計者のつもりなので、こういう点は大事にしたいです。自分は設計が楽しいからかわロボをやっているので、むしろこういうところを強化していって便利なかわロボを作っていきたいです。
あとは「アーム替えようか迷うけど交換だりー」みたいなめんどくさがりの自分対策でもあります。フリーランスやってると自分のご機嫌をいかに取るかって事がどれだけ大事なことがわかります。自分お気に入りの機構を搭載することで「アームかちゃっと交換できてカッケー!アーム交換楽しい!」となり必然試合にも勝ちやすくなります(たぶん)そのためにわざわざ機構のロック音を派手にするためにいらないくらい強いバネまで入れてます。たゆまぬ努力に涙が出るじゃろ。

アーム機構。
普通のスライダー機構。ただアームがコンパクトになるようにスライダー溝に対して明後日の方向にアームが伸びてる。こうすると収まりかいい。
最終段ギヤの回転中心とスライダー軸をあまり離さないようにすればアームの軌道が円弧に近くなりますが、今回のアームはわざと離していて、最終段ギヤの回転角に対してアームの回転角が大きくなるように増角しています。確かギヤが120度回る間にアームは180度くらい回ります。揺動してる感強い。
ギヤ比は150くらい。モーター2発。ほんとは左右に同じギヤボックスを付けてモーター4発にするつもりだったけど、おそらく4発分のパワーが片方にかかってギヤが綺麗さっぱり折れたので重量問題もありギヤボを片方外した。でも2発でも特に問題を感じないのでそのままにしてます。
~脚編~

脚は4枚脚のスライダヘッケンでホイールベースは196㎜。(Linksでいう)クランク高さは60㎜、ギヤ比は35:1でちょっと遅く感じる。でも4相脚なのと特殊なヘッケン比によって走ってる感触はとてもいい。自分は毎回設計に新規の工夫をいくつか取り入れていますが、今回のマシンの一番の成功といってもいいです。
ただしなんで走破性が良くなったかについての理屈は説明がちょっとややこしいので後日別の記事にまとめるつもりです。

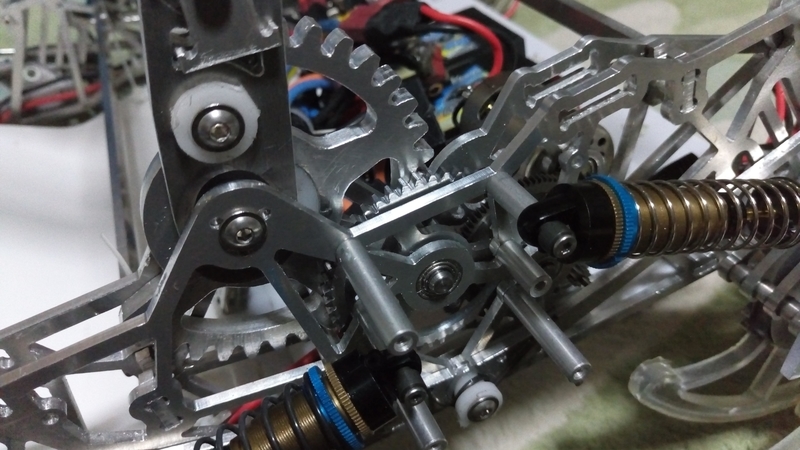
サススライダー
今回のゲテモノ部位。このサススライダーは開放状態で上に寄っていてサスを縮めると下がります。画像では左側の脚を上げる(=サスを縮める)と右側のサススライダー(正確にはオイルダンパーの固定してある直動レール)が下がっています。つまり左の足は右のサスに、右の脚は左のサスに繋がってます。これは真ん中のボディーにサスをまず2つ縦に配置して、それと脚をリンクさせようとしたら交差しないと脚の可動域に対してサスの可動域を取れなかったので嫌々こうしました。めんどかったです。
元々はここにサスを配置しとけば脚のユニットがコンパクトになって設計を流用する時に楽になるかなと思ったんですが、コンパクトにはなったけどあんまり窮屈になってしまったし脚がぶつかるからこれ以上脚を大きくできないしであんまり設計としてのメリットは無かったです。無念!動いてる見た目だけちょっと面白い。
サスの可動範囲は地面から垂直に見て上に20㎜下に10㎜。オイルはタミヤの400番を入れてバネは外形18線形1.8くらいのを入れてます。

ボディーサス
赤い丸がサスの回転中心で裏表二つパーツを外すと脚の片方が分離する。ここをメンテしやすくするのが今回のマシンの目標の一つ。
赤い線はサスの回転中心から脚の回転中心まで引いた線。軸回転のサスはここを水平に近づけるとサスの性能が良くなるからサスの回転中心をできるだけ下げるように設計してる。
サスの性能もメンテ性も良くなったのでGood

カバー
設計するのがチョー楽しい。防御力も申し分ない。素材はカーボン入りPLA。みんな3Dプリンター買おう。

足裏
シリコンのt3。分厚めにしたけど、これも良かったのかも?

スライダーの端に付けたクッション
スライダーヘッケンの溝の端のクリアランスを1.5㎜取ってたら反転したのでそれを埋める用のクッションをつけて調整した。Links上の数値も攻めていたのでまぁこんなことにもなるかと。今回思ったのはスライダヘッケンを作るときにスライダー端のクリアランスはいらないんじゃないかと。どうせスライダー軸がスライダー端にぶつかるんだから”ぶつけて反転させる”くらいの気持ちで良くね?っていう。カムやスライダーの寸法誤差のガタも含めるとクリアランス0㎜でも十分動いてくれると思います。
あとはクッションを入れることで当たり方がマイルドになった気もしたので、機構の動きをスムーズにするという目的で入れてもいいかも知れません。

最後にお腹
つるつるしてて可愛い。
以上です。最高性能的にはかなり納得しています。が、メンテ性や耐久性に微妙なところがあったり造りが甘くて効率が悪いところなどもあるので、その辺を改修したものを一台作って白兎シリーズは終わりにしたいと思っています。
第26回かわさきロボット競技大会

お疲れ様でした。
今年もかわさきロボット競技大会に参加してきました。
かなり久々の決勝トーナメント進出&企業賞ももらい充実した大会でした。
順位としては決勝トーナメント2回戦敗退でベスト24となりもうちょっと行きたかった!というのが本音としてありましたが、商品券4万円に心が持っていかれて忘れました。金は心を潤します。
企業賞を貰った際も「造りが良かった。操縦も。」という言葉をいただいて嬉しかったです。
自分はかわロボ本大会に参加して8年経ちますが、今まで作った機体はだいたい脚が悪いかアームが悪いかで機体として完成しているものがありませんでしたが、今年はアームも脚も壊れる心配をせずに存分に戦えてめっちゃ楽しかったです。みんなこんなに楽しい遊びをしていたんだなって。
しかし今回の大会は自分だけでなく周りの人の力も借していただきました。決勝トーナメント1回戦も、当日にバリがまだ残った状態の部品を会場で組み立ててたらいろんな人が手伝ってくれてやっと間に合い勝つことができました。多分あの試合が無ければ賞も貰えていなかった気がします。この場でお礼申し上げます。
当日バリ取りや組み立てを手伝ってくれたUさん
試合もあるのに自分のマシンのメンテもせずに組み立ててくれた後輩J(メンテくらいしよう)
バイスややすりを貸してくれた電大の方
電動工具とか貸してくれたT-Mさん
高級グリスを貸してくれたMRっち
予選敗退を散々煽り散らしたのに予選後うちに来て徹夜で加工を手伝ってくれてセコンドにも入ってくれたN先輩(思ったより重労働ですみませんでしたァ!)
本当にありがとうございました。まさか色々道具を貸してもらって家より良い環境が大会当日の机に顕現するとは思いませんでした。あと周りの人にはうるさくしてすみませんでした。来年はちゃんとできたマシンを持っていこうと思います。(そりゃそうだ
試合の感想ですが、今年は試合中ほとんど緊張せずに戦えたのでとてもいいコンディションでした。おそらく原因は徹夜の疲れで感情が死んでいた為緊張もしなかったんだと思います。やっぱり大会前日は徹夜が基本ですね。
マシンの性能が割と良かったこともあり、だいたい思ったように動いてくれて良かったです。最初の方は逆にマシンが走り過ぎてコントロールできていなかったくらいでしたが。
決勝トーナメント2回戦で負けた試合の敗因は横回転への対策不足でした。来年は当たらないように祈ります()
あとは今年から操作を差動操作ではなくVテールにしたんですが、これが操作しやすくてビビりました。最初こそ差動の癖が出たりしたんですが、慣れれば走ってる時にアームを上げてしまうというあるあるなやつが無くなって精神的にもすっきりしました。脚の動きに集中できるのはほんとに良いです。
今年の機体についてはまた別の記事で書こうと思います。そこそこ良い水準でまとまったと思いますし、新型スライダヘッケンについてはちょっと自慢したいです!
これからの学際シーズンも回ろうと思いますのでよろしくお願いします。あと学際シーズン終わったら貸し切りのかわロボサバゲー企画しようと思ってますので興味のある人はよろしく。
以上
伸縮スライダーフォークロッド的なシャカシャカアームについて

↑こいつのアームの話
今回はこいつに使っているアーム、通称「ダインスレイヴ」秘匿呼称”シャカシャカアーム”についてせっかく面白いもの作ったので解説します。作ったの何年前だよってつっこみは無しで。
ちなみに元ネタは

これをこうしてこうじゃ!

まぁ機体の話はいいんですが。
アーム自体の性能はかなり良く、一部の機体に対してかなり有効に戦えるものとなりました。というか、操縦技術がとんとんなら負けるはずないだろうってくらいに強いです。
このアームにたどり着くまでに色々な変移があったので、簡単にそっちから。

1号機
戦闘コンセプト:二本のアームで敵を挟み撃ち!ロボット少年の勇気と希望を乗せた双方向からの挟撃を躱すことなど不可能!相手は死ぬ!!!!そんなわけはなくリーチの短さとパワーの無さでシールド回転に玉砕。そもそも押し出しがコンセプトだったがリング際のかまぼこの絶対防御を崩すことができなかった。

2号機
戦闘コンセプト:小型中射程からの猛攻!やはり小回りが足りなかった!相手を翻弄しつつ安全地帯からの双撃!守りと攻撃を同時に可能にした左右独立のアームに隙は無い!相手は死ぬ!!!!!そんなことはなく、一本あれば守り切れるほどかわロボは甘くない。しかも射程が微妙でロングロッドには負けるしシールドアームの下側に潜り込ませても相手の本体にアームが届かない。しまいにはロングロッドのカウンターにリーチ負けして本大会は敗退。あと有限回転の4ch操作はアホほど難しいことがわかった。
3号機
戦闘コンセプト:やっぱりリーチは正義だよアニキ!横幅も増やして相手を左右から挟み込むことで絶対に対処しきれない攻撃範囲を確保!減速比も落とすことによって操作性の向上も!今までの恨みと悲しみを乗せた双肩は比類なき破壊をもって相手の守りを粉砕する!相手は死ぬ!!!!!!!!!!想像は自由だよアニキ。でも創造できるかは現実が判断するんだよね。伸ばしたはいいけど未だに中途半端なリーチと減速比を落としても左右独立アームの操作しづらさが僕のリアルを破壊した。明らかなコンセプトとしての弱さは軽減されたものの、それ故に浮き出てくる操縦技術の無さ。なぜ人の腕は2本ついてるのにロボットだとこうもうまくいかないのか。僕は悲しんだ。

4号機
戦闘コンセプト:やっぱり戦いはパワー&スピード!要はつっこんで投げれば勝てるって話よ!アームを下げたまま相手の懐に飛び込んでそのまま投げ飛ばす!相手の攻撃を受け流す機構で一方的な攻撃を可能にした4本のアームはもはや盾であり矛!その一点の隙も無い武装は瞬きの間に相手を地獄へ叩き落す!相手は死ぬ!!!!!!!!悪くはなかったが戦い方に癖があったり全然戦えない相手がいたりして相性の差が激しかった。あえてアームの下を丸くするという発想はアームを下げながら突撃するという勝ち筋と、相手からの防御を困難にする負け筋を同時に産んだ。しかし本数を増やすという単純な事で戦術が大幅に広がるという発見もあった。あと3chがやっぱり使いやすくていいです。
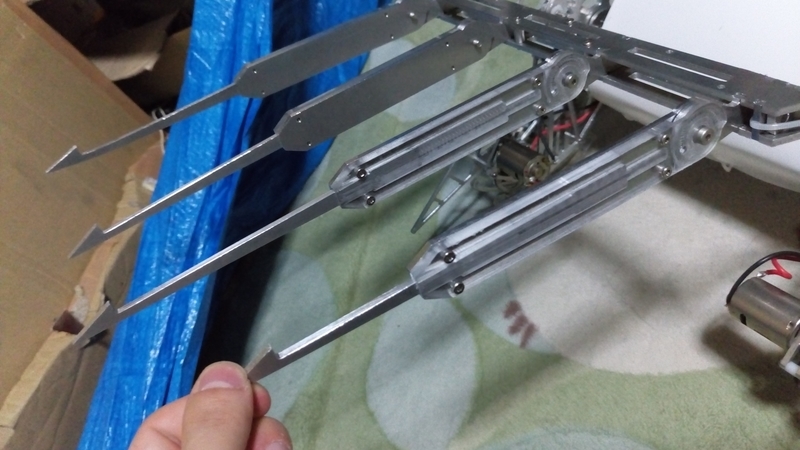
6号機
戦闘コンセプト:やっぱり数に勝る正義はなかったよアニキ!4本のアームで相手を串刺し!守れないという欠点を排除したアームはどんな局面にも対応可能!攻防一体の4本の槍はどこからでも相手の急所を抉り取る!相手は死ぬ!!!!!!!!!!!!!
ここまでの経緯を経てある程度の方向性をもって形になった新型アーム。今までで一番多局面に対応可能で、かつ明確な勝ち筋を用意している。4号機とは少し違うように見えるが、役割だけ見れば上位互換である。しかしできることが多い反面使い方を理解していないと使いづらいし、自分も使いながら戦い方を模索した。対シールドアーム用食器型決戦兵器。
雑に紹介しましたが、ここからがアームの大事な部分の話になります。造りは雑だし難しい構造は一切ないので、解説はしないっていうか参考にはしないでください。
一番大事なのは使い方で、このアームの要素を理解している必要があります。
このアームの要素とは大きく二つあり、”4本あること”と”スライドすること”です。さらに二つ合わせて初めて戦える部分もあります。そうふたりはプリキュアですね。
4本あるといいこと
・相手に近づかれにくい
例えば1本ロッドだとその1本を捌かれれば抜けて近づかれますが、2本あれば2本同時に捌かなければいけないし、4本くらいになると全部いっぺんに捌くのはもう無理です。なので自分より射程の無い相手にはアームを下げている状態で負けなくなります。
・投げやすい
1本ロッドで相手を持ち上げようとすると左右に転がりやすいですが、2本以上あると相手を投げ飛ばしやすくなります。4本もあれば2本くらい相手の下に潜りやすいので、投げる姿勢が安定します。
・盾っぽくも使える
かわロボで言うなら、ロングロッドは線攻撃、シールドアームは面攻撃と言えます。線攻撃は刺しやすいし、面攻撃は守りやすい。このアームはロッドが4本あるので線攻撃となりますが、一方機体を相手に対して斜めにすることにより、相手の攻撃を受け流しやすい面として使えます。これにより少しの挙動で攻撃と防御を入れ替えることができ、射程で劣る相手にも戦いやすくなります。
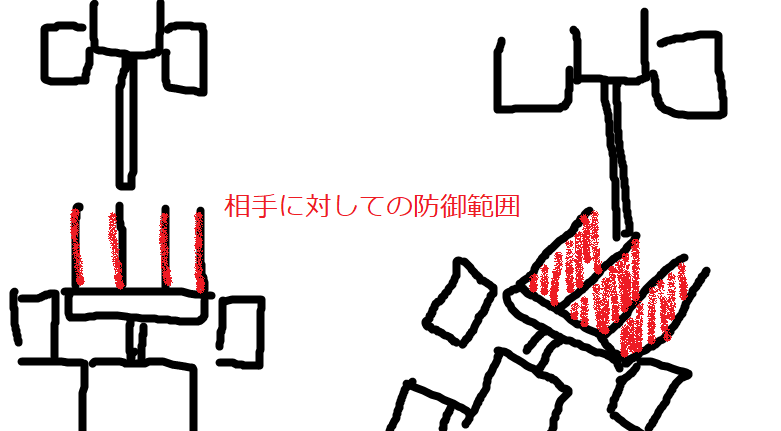
図1 作品名「努力の限界」
(気持ちでわかって)
・なんか挟まったりする
たまに相手と組み合ったとき、2本のアームの間に相手が挟まったりするとそのまま勝負が決まります。狙ってできるものじゃなく偶然なんですが、こういう現象も加味するとアームはもっと多くてもいいかなと思ったりします。
逆に4本あるとよくないこと
・リングにアームが刺さる
4本あれば防御には向いてますが、逆に攻めようと思うとアームがそのへんに刺さります。攻めるにしてもなるべくアームは低くしておきたい都合上、攻めづらくなってしまうのは一番の欠点です。特に普通に相手のボディーの下にアームを潜り込ませる動作が基本できなくなります。
・アームを潜り込ませられない
上の話と繋がりますが、例えばロッドに対してシールドの方が相手にアームを潜り込ませづらくなります。これはアームの攻撃面積分の余裕が無いと当然アームは入っていかないからです。例えば相手の側面にから攻撃する場合、ロッドの方が攻撃に必要な面積が少ない分余裕をもってアームを刺せます。逆に極端な例では、アームの先端が横一文字に広いシールドは相手の側面から刺すことは基本的にできません。
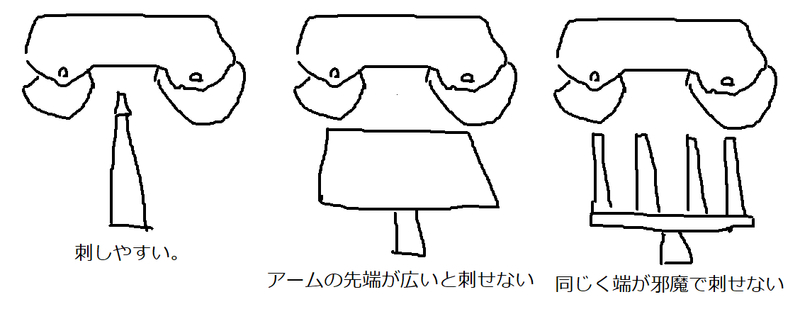
図2 作品名「ルビンの壷」
・重い
これは気合でなんとかなる
スライドするといいこと
・刺さりやすくなる
「え?刺さらなくなるんじゃないの?」というそこのあなた。実は刺さるようになるんです。というより、勝手に刺さってくれるようになります。(詳しくは図で)これにより相手への決定打が決めやすくなり、勝てる状況が格段に増えます。特に大きいのが、刺されば相手を投げられるので相手の下を取らなくてもボディーのどこかに刺せば良く、下の取り合いをしなくてもいいようになります。これが”下を取れないけど隙を見て突っ込めば勝てる”4号機に対して”下を取らなくても良いしなんならアームが下がってても勝てるし守りもできる”6号機を上位互換と呼ぶ理由です。アームを下げきって走れなくはなりますが、”アームを下げて突っ込んで投げるだけ簡単”と”てきとうにその辺に刺して投げるだけ簡単”なのでそう意味合いは変わらないと思ってます。
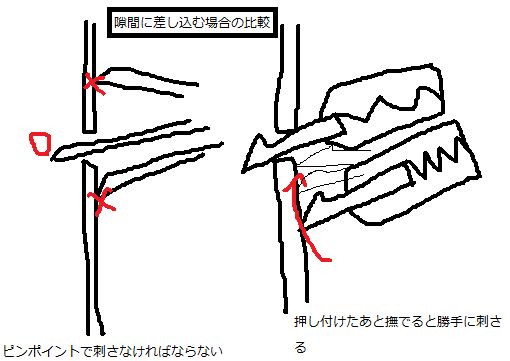
図3 作品名「まだわかりやすい気がする」
・リングに刺さりづらくなる
「今度は刺さりづらいのかよ!どっちだよ!」って感じですが、これは話が簡単で伸縮機構により勢いよくリングの障害物に突っ込んでも衝撃が緩和され、ロッドの先端ががっつり刺さって動けなくなるといった事態を回避しやすいということです。その程度ですが、これが後に大事になります。
・投げやすくなる
相手を投げる際に通常”アームを下げる→アームを下に入れる→投げる”といった動作が必要ですが、アーム先がスライドすることで”アームを相手に押し付ける(アームが縮む)→アームを下げて(アームが伸びる)すぐ上げる”という動作に変更できます。これがやってみるとかなり簡単で、追いかけっこになった場合追い付いてすぐ相手を投げる挙動まで行えます。
・カッコイイ!
男の子は遺伝子レベルで伸縮機構とかそういうの大好きなんです。
スライドしてよくないこと
・重い
気合でカバー
・部品が多くなる
愛でカバー
ふたりはプリキュアなところ
・4本あるとアームを潜り込ませられなくなる-スライドして刺さりにくくなる=アームを潜り込ませられるようになる
4本あることでアームが相手に刺しにくくなる欠点がありましたが、スライドすることによってその点を完全にカバーできます。詳しくは図
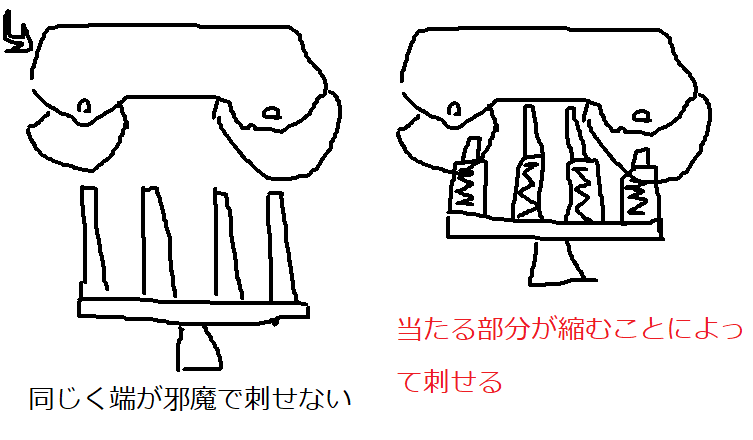
図4 作品名「ロビンの壷再び」
これによって弱点その1がカバーでき、疑似的なシールドとして使えながら、シールドとしての欠点をかなりの割合で克服したアームとしての性能が得られています。
・4本あるとリングに刺さりやすくなる+伸縮することでリングに刺さりにくくなる=4本あっても使いづらさが減る
これは完璧にとはいかないですが、伸縮することで刺さりにくくなるので使いづらさを軽減できます。スライダーの長さが長くなればなるほど使いづらさは軽減していきます。
・4本あると攻めづらくなる+伸縮を利用してアームを下げなくても攻撃できる=下を取らなくていい上にアームが多いほど攻撃力が増す
これはこのアームの攻撃方法のメインでありこのアームの二つの要素のシナジーがかなり強い部分です。スライドを利用しててきとうに刺せば投げられるのであれば、その手数は多いに越したことはないです。釣りで言うギャング釣りみたいなものですね。ただしこれをメインに考えるのであればリーチはあるに越したことが無いので、ミドルロッド(500㎜~600㎜)くらいにはあったほうがいいなと思いました。
攻撃方法
大事な要素は全て書いたと思いますが、じゃあ結局どうやって戦うのっていうことを簡単にまとめます。
1、迎撃作戦
自分よりリーチの短い相手に対してカウンターを狙いに行く戦い方です。特にどこに刺さりそうかを考えて反撃していくと勝ちやすいです。
2、くねくね作戦
自分よりリーチの長い相手に対して、突っ込んでは反撃を斜めに受け流して回避、という流れをくねくねしながら近づいていきます。これができないとロングロッドに勝てないです。
3、ぶっさし作戦
相手の攻撃を防ぎつつ、相手のボディーを狙って刺していきます。経験上アームを強く押し込むほど良く刺さり、肉抜きの隙間だけでなくカバーの隙間や脚にまで刺さることもあって割と信用しています。
4、おっかけ作戦
追いかけっこになったら相手のおしりでも側面でも狙って投げていきます。上で説明した通りアームを押し付けてから↓↑入力で即強投げまで派生できますので、追いかけっこもしやすいです(脚がナメクジでなければ)
5、あきらめ作戦
横回転が来たら絶対無理なので換装アームを用意しておきましょう。なかったら作戦通りいきましょう。
反省点
これはコンセプトではなく個人的な設計の反省点です。箇条書きで。
・カウンターが短かった。特に端のアームで持ち上げると側転倒しやすかった
・アーム先が細くて曲がりやすかった
・アームの中折れ機構の付け根をもっと手前まで持ってきて攻撃されない場所を長く取るべきだった
・中折れ付近の構造がちゃっちくてアームが左右に傾いたりしてたからちゃんと造るべきだった
・アームのリーチをもう少し伸ばすべきだった
・アームはもっと多くても良いと思った
・アーム先の交換は楽にすべきだった
・ちゃんと換装アーム用意しとけや増田ァ!!!!
終わりに
いかがでしたか?今回はせっかく作ったんだから忘れる前に書いておこうと思って、思い出せてよかったです。
このアームは今までにあった有限回転系アームの特性を元に改造して、色々なアームのいいとこどりのようなものになりました。まだまだ改良の余地がたくさんあるので、よければ作ってみていただければ嬉しいです。
また、今回の記事で一番発信したいことは「かわロボのアームはまだまだ開発の余地があるんじゃないか」というところです。大会上位勢を見るとやはりスタンダードから外れていない形状が多いです。もちろん使いやすく洗練された形状だから支持され続けていることは間違いありませんが、せっかくのものづくりなのだからそういったスタンダードに勝負してみるのも面白いんじゃないかと思います。自分は結局何年かかけてこれに行きつきましたが、一つ納得できる形になって続けて良かったです。
大変長くなりましたが、見て下さりお疲れ様です。書く方も疲れました。おやすみなさい。
頭蓋骨膜洞(ずがいこつまくどう) sinus pericranii
For English
If you want to know about this sick"sinus pericranii " in detail, please comment.
I try to tell you about this sick.
I'm not a doctor, but I teach my experience as a patient.
ついでに書いておきますが、この病気は超レアかつ頭部にできる為、親知らずを抜くよりかは手術が多少難しいものですが、既に手術は終えてあり命や日常生活に支障をきたすものではありませんし、頭を手術したからといって知能に影響はなく仮に自分の普段の言動や行動がおかしかったとしてもそれは病気のせいではなく生まれ持ったセンスでありこのセンスを理解できない自分のセンスを改めて下さい(/・ω・)/ポイ
初めまして、このブログの管理人です。
本日は自分の24歳の誕生日であり、この病気の手術をした4歳から20年も経った記念(?)として筆をとった次第です。
この記事は極稀に出現する同じ病気を持つ方、もしくはその関係者、また患者を抱えているものの症例の少なさにお困りの医療関係者の方への元患者としての情報の提供を目的として記録に残すものとします。
まずはこの病気の説明から致します。誤解の無いよう、できる限り主観と事実とを分けてお話するつもりですので、ご覧になる方も気を付けて読んでください。
タイトルにもある通り、この病気の名前は”頭蓋骨膜洞(ずがいこつまくどう) sinus pericranii”
名前にあるように頭蓋骨にできる病気で、特徴としては頭に血が上ると袋ができる・通常凹むという腫瘍の様なものがあり、これは頭蓋骨に穴が空いて頭蓋骨の内外が導通しているために血液や髄液が行ったり来たりすることによって膨らんだり、縮んだりするようです。
一番は頭蓋骨に穴が空く事で、それに伴って腫瘍(血とか溜まる袋)ができることが多いようです。(これはネットにある情報の受け売りです)
自分の症状ですが、頭蓋骨に空いた穴で頭蓋骨の内外の血管が繋がっていて、ついでに血液の溜まる袋が寝ると膨らんで起きたら縮んでいたのを親が発見して外科手術によって穴は塞いで、ついでにそこに生えてた腫瘍(これはほんとの腫瘍)を切って取りました。なぜか袋の方は放置されており現在も寝るとぷくぷくします。なんで取らなかったんねん!と思いますが、別に生活に支障は一切ないもののたまに気になります。
ちなみにこの袋の中身をレントゲンだったかで撮ると白い影が写ります。お医者さん曰く、これは古くなった血液が残っているか、髄液が流入しているかのどっちからしいです。古くなった血液が残っている場合は特に問題ありませんが、万一塞いだはずの穴が空いてて髄液が流入した場合、この袋を破損すると脳内の髄液が漏れ出して大脳を支えられなくなり死ぬ危険はあるようです。
それと、これは自分だけなのかわかりませんが、頭蓋骨が薄くなっています。手術当初は患部である左側頭部(耳より少し上くらい)に直径2㎝くらいの範囲で頭蓋骨の薄い部分がありましたが、現在は3㎝×10㎝くらいの楕円刑に広がりました。これは成長と共にちょっとづつ広がっていき、10歳くらいで元々の患部ではないところに窪みができ始め、15歳くらいでくっついて現在は完全に一つの窪みになっています。手術当初の頃で最薄部が1㎜くらいだと言われていました。現在は成長したし2㎜くらいあるんでしょうか。なんにせよ物理防御力が低下しているのでスポーツをする際は気を付けています。自分はスノボーやスケボーをよくしていたのですが、ヘルメットは常に着けていました。
この症状から、この病気は頭蓋骨の成形に異常があるという病気なのでは?と思っています。これは完全に素人考えです。
あとの症状と言えば患部だった場所が直径2㎝くらいしばらく禿げていたことですが、これは多分手術をしたからだと思うのでどうしようもないですね。幸いにも自分はオシャレに興味のない性格でしたので髪を伸ばしててきとうに隠してました。10年もしたら髪が生え始め、現在はすっかり元通りになっています。しかし手術で切って縫った跡はがっつり残ってるので、現在でもあんまり髪を短くはしていないです。そして幸いなことに、現在もオシャレに興味があまり無いのでそこまで気にはならないです。おかげで浮いた話もありません(笑)
4歳で手術をしてから今まで問題も無く、術後10年は定期的に検査をしてレントゲンやMRIを撮っていましたが、全然何もないし無駄に被ばくするだけじゃねと思って止めました。頭蓋骨が薄くなったのと未だ残ってる袋が気にならなければ全く健常者と同じ生活です。
10年位前まではネットで検索しても全く情報なんか出てきませんでしたが、今はちょくちょく日本語の論文や症状の解説なんかが引っ掛かるのがすごいですね。でも術後の経過なんかはまだ貴重な情報ではないかと思うので残す意味もあるかと思います。
では患者の方やその関係者の方へへこの病気と長く付き合ってきた身からアドバイスします。
この病気は直接死ぬことはまず無いらしく、その危険性の低さと症例の少なさから特に研究もされていない「レアだけど弱いキャラ」みたいな感じです。
しかし全く危険が無いわけでは無く、頭蓋骨の内外が導通しているという状態は物理的にはとても危険な状態です。通常頭蓋骨の外の血管は細く、切っても多少血がだらだら出るくらいですぐに血も止まりますが、この状態だと中にある太い血管の血液が一気に流れ出し死ぬ危険があるようです。なので発見した場合は速やかに手術をすることをお勧めします。手術自体は簡単なものなので、それさえ済めばすぐに死ぬことはまず無いです。
ちなみに自分は術後に頭を切る怪我をしていますが、血が止まらないという事はありませんでした。患部だった場所を直接切ったわけでは無いですが、当初あった血が止まらないという危険が術後は大丈夫だったという事は身をもって検証しました(検証したくはありませんでした)
あと、頭に残った袋は病院に行ったら「気になるなら取ってあげるよ」って言われましたが、気になる事より入院するのと注射を打たれる事の方が断然嫌だったのでまだ取ってません。こういうのって歳を取ってからあんまり無暗に取らない方がいいとか聞きますし、問題なければ手術したときについでに取ってもらったらいいと思います。
それとこの病気かもと診断された方は、すぐに詳しい病院へ行くことを強く勧めます。なにせよ症例はほんとに少なく自分が手術した1998年当時で日本で13例目の発見というほどそもそも認知されていない病気です。もし気になれば自分が受診した病院をお教えいたします。
自分も引っ越しに伴いいくつか病院を変えましたが、定期検診で行くと余裕で誤診されます。この病気を知ってる医者もそもそもめちゃくちゃ少ないですし、素人が変なこと調べて自己診断するな!って怒られたこともあります。通常は医者の言う事をよく聞いて素人判断はしないというのは自分も気を付けますが、こういう珍しい病気に関しては自分が詳しくないと医者を頼れません。自分は医学の知識はないですが、この病気の症状に関しては自分より詳しい医者なんて日本に何人いるのかって感じですから。手術をする時は詳しい医者を探して診てもらうでしょうが、定期検診などで簡単に受診できずやむなく近くの医者に行く場合、きちんと症状を説明してください。自分は毎回レントゲン取ってもらう以上の期待はしてませんでした。
あと、もしかしたらこの病気かもしれないと疑っている方も、しっかり病院で診てもらってください。ほかの病気と間違われたりしますが、頭蓋骨に穴が空いている等明確な特徴があります。
最後に、上記は自分の体験に基づくものであり、医学的な一切の見解を含みません。
この病気は投稿時現在原因がわかっておらず、先天性なのか後天性なのかもわかってはいないようです。
自分は遺伝子的に頭蓋骨の成形が下手なのではと思ってはいますが、頭蓋骨に穴が空いているものを頭蓋骨膜洞と一概に呼んでいるだけで、原因や症状なども実はバラバラという可能性もあります。
実際発表されている論文では頭蓋骨に穴が空いている以外の合併症が症例が少ない割に色々と書いてあります。自分も血管にできてた腫瘍(親曰くキノコみたいだった)がありますし、骨が薄くなっているのも全く別の病気とは考えづらいですし。
とにかく詳しそうな病院で診てもらってください。今ならネットで論文を発表している先生もいますので、そういう方のいる病院に行くのもいいかと思います。
もし自分に実際に話を聞きたい方などがいれば連絡をいただければお話します。が、ここに書いてあること以上は特に無いと思います。
長々と書いてしまいましたが、ここにある自分の経験がどなたかの役に立つならとても嬉しいです。
P.S.よく一緒にいる人へ
日常生活に支障は全然無いですが、一応不慮の事故で怪我した場合ワンチャン死にやすい可能性もあります。
もしその場合は最後に一発何かやりたいと思ってますので、近くにいた場合写メってフォトショでイケメンにして遺影にしてください。あとこの体は臓器提供か献体する予定なので宜しく頼みます(遺言)
参考文献
ニードルカム
オハヨー!!コンニチワー!!!コンバンワー!!!!オヤスミー!!!!!
 ニードルカムです(みえづらいですがひだり側に挿してあるのがピンです)
ニードルカムです(みえづらいですがひだり側に挿してあるのがピンです)
 こいつの
こいつの
 これの部分の
これの部分の
 この丸いのが
この丸いのが
 パカーしたやつです。
パカーしたやつです。
オキテーーーーーーーーーー!!!!!!!
はい、はまってます。
今回はかわロボに関する事で、一つブログにまとめます。
何かというと
これはかわロボの脚機構のカムリンクに今回使ってる軸受なんですが、データが少ないのでもし使ってる人がいたら使用感を聞きたい&興味があるなら使ってもらって感想を聞きたいっていうつもりで書きます。
1、ニードルカムとは何か
カムはカムリンク、カムクランクと呼ばれるよくある機構なんですが、そこの外周にいくらか溝が掘ってあり、そこにピンを挿してそのピンが滑ることによって軸受になります。ニードルベアリングに似ている為、何となくニードルカムと呼んでますが、もしかしたら他に呼ばれてる名前があるかもしれないです。
ただしニードルベアリングは転がり軸受なのに対してこちらはどこまでいっても滑り軸受なので、抵抗値に関しては敵うはずありません。
2、何が良いのか・悪いのか
このカムリンクと同じ様な構成でベアリング・オイレスを使っている脚は多くあるので、それと比較します。
ちなみに自分は何も軸受を入れずにカムも脚もポリカにしてシリコンスプレーをかけて使ってる脚がお気に入りですが、今回は比較はしません。
メリット:軽い・安い・壊れない
・軽い
例えばよくある構成として3×8×4のミニチュアベアリング3個を使って脚の合計が12枚の時の重量は1個0.83g(参考)×3個×12枚=29.88g
4×6×4の#80オイレスブッシュを同数使った場合0.35g×3個×12枚=12.6g
それに対して
2.5mm×5mmのピンを使った場合0.19g×3個×12枚=6.84g
めっちゃ軽い!んですが、そもそも重量の絶対値からしては微々たる数値なので、とりあえず軽い程度でいいかと思います。
・安い
モノタロウ調べで値段を比較すると
ベアリング1個 100円 36枚合計で3600円
オイレス1個 35円 36枚合計で1260円
ピン1個あたり 8.78円 36枚合計で316円
安いのは間違いない!ピンだし!(笑)
・壊れない
これはデータがないので実体験で書くと
ベアリング→使っている内摩耗してくる。球がいなくなる等
オイレスブッシュ→基本丈夫で壊れないが、たまーに割れる
ピン→ピン自体はまず壊れはしないが、カムの方が削れてくる(はず)
実用面での壊れにくさはオイレスブッシュで十分な気がしますが、壊れることはありえないくらいの安心感がピンにはあります。
デメリット:抵抗が大きい・部品が細かい
・抵抗が大きい
これについては詳細な資料を持っていない&自分に専門知識がないので詳しくは比べられませんが、ネットで簡単に手に入る資料からざっくりといきます
NTNの公開している資料を見ると転がり軸受とすべり軸受けには1/100以上の摩擦係数の差があると記述があります。
ラジアル軸受の摩擦係数は0.0015~0.002[-]
オイレス工業の資料から近い条件のジャーナル回転試験での無給油の摩擦係数が0.25~0.3[-]程ですね。
ちなみにグリース有だと0.1[-]程度まで落ちる様ですね。
そして鉄―アルミの摩擦係数が・・・0.82[-]
ダメやん!!!
ベアリングとの差がなんと210倍もあります。これがどういう事を表しているかおわかりでしょうか・・・つまり
潤滑油を使えという事です!!!!
まぁ油をさしてしまえば解決する摩擦などいくらでもありますから。というわけでピンの場合無給油では使えないというデメリットがあります。クリーンで使いたいという人はいると思いますので、そういう用途では向かないと思います。
・部品が細かい
細かいです。ぽろぽろ転がってよくかくれんぼをしたりします。
実際抵抗が大きいので潤滑油が必要、くらいしかわかりやすいデメリットはないように感じます。まだ1年も使ってないですが、なかなか感触はいいです。
あと軽い!と言いましたが、ピン自体が軽いというよりはピンが小さくできる事によってカムの肉が減って軽くなる作用の方が大きいんじゃないかと感じます。
溝がいい感じに油だまりになるので、潤滑油は長持ちしやすいと思います。
あと比較の為にピンを3本にしていますが、脚が歪んだりすることを考えるとおそらく最低6本あった方がいいです。(自分はポリカ足なのでそう感じました)
まとめると
・軽い
・めっちゃ丈夫
・コスト面はばっちり
・ただし潤滑油必須
・潤滑しても摩擦はベアリングに負けるよ!
なので
・とにかく軽くしたい
・何が何でも壊れないでほしい
・お金ない
・汚れてもいい
・性能よりは運用を考えたい
という時には使えるのではないでしょうか。(自分にはぴったりです)
逆に
・重量には余裕がある
・壊れたら交換するからいい
・かわロボに使う金は惜しんでない
・油なしでクリーンに使いたい
・運用よりは最大性能を求めたい
という時には不向きだと思います。
どうでしょうか?正直自分もまだまだ使い込んでは無いので、もしかしたら思わぬ罠があるかも知れませんが、それでも使ってみたいと判断した方は是非一緒に人柱になってください。
あとそれやったけどこれがアカンかったぞ!とかこれ使えるで!みたいな人は犠牲が増える前に教えて下さい。お願いします。
まぁもしよくわかんないけど気になるって感じなら・・・
使ってみるしかないんやんな!!!??
(しゃべって動けるストロングゼロ、ルナちゃんをどうぞよろしくおねがいします)
以上
かわさきロボット第24回本大会
本大会お疲れさまでした。

 4本ロッド
4本ロッド
 電装ケースは広々としてますね。
電装ケースは広々としてますね。
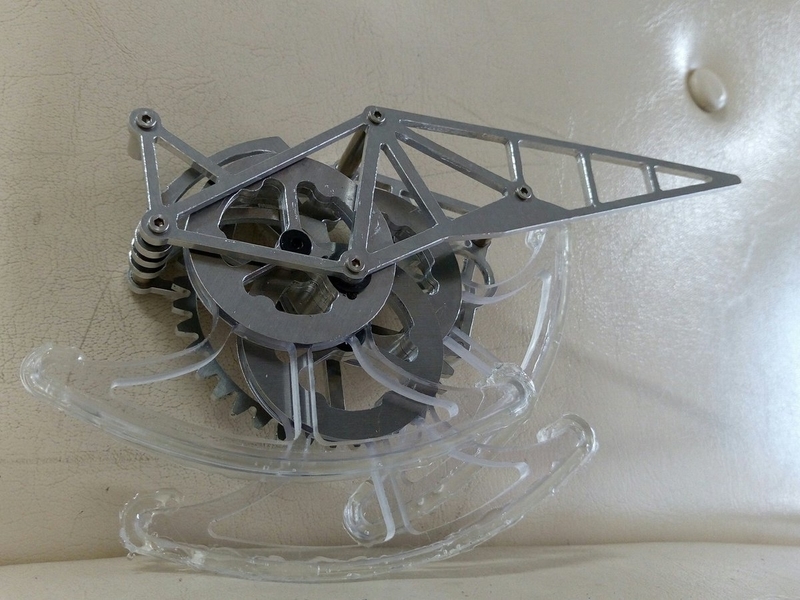
 脚機構は最近流行りのカムヘッケンです。
脚機構は最近流行りのカムヘッケンです。
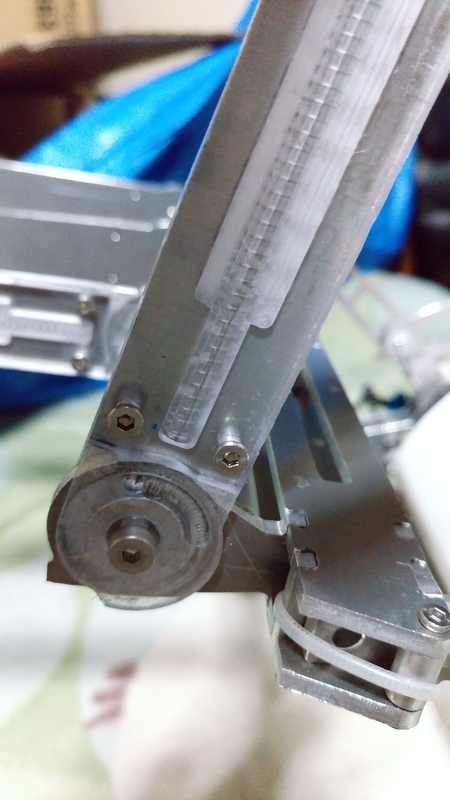
 足回りはこんな感じで、スライダー溝で可動域が設定してあり、それぞれオイルダンパーがついてます。
足回りはこんな感じで、スライダー溝で可動域が設定してあり、それぞれオイルダンパーがついてます。

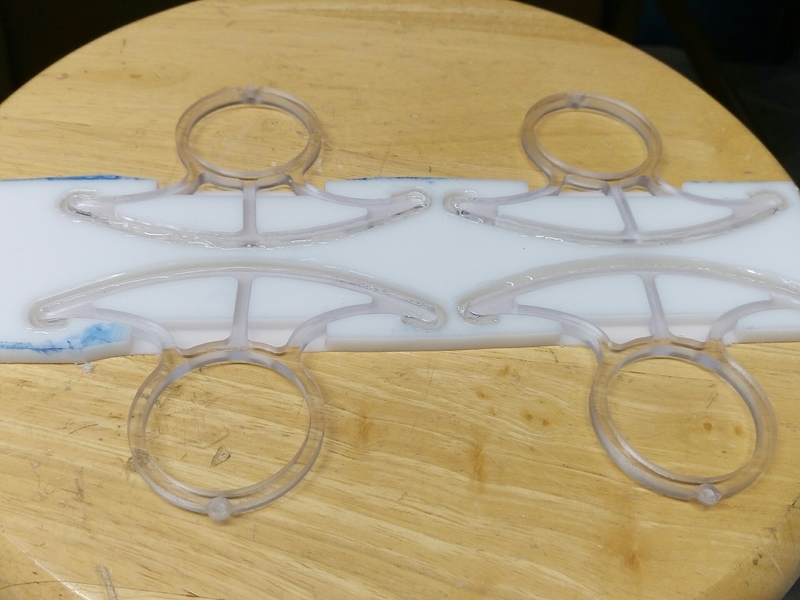
 成型の過程です。
成型の過程です。

皆さんはいかがだったでしょうか。
人により色々だったとは思いますが、なんにせよ今年の結果を踏まえ、来年に生かしていきたいですね。
僕はといえば、大会に挑むに、早めに作る以上に大事なことなんてないんだなって思いました(小並感)
そんな学習能力を有すると自称するヒト科ヒト目人類の私ですが、
なんと来年の本大会用のマシンを作っていました!
1年早めに完成したので、今年の本大会に持っていきました。
そういうことにしましょう。ポジティブ以上に自分を救うものなんてないんですよ。
一応5試合あったんですが、相手とまともに戦った試合が1試合しかありませんでした。しかも参加6年中3回目の対戦カードでした。
因縁にのみ勝利し、あとは自分にまけました。
ともかく来年に向けて頑張ることにします。
~~~マシン紹介~~~

最終兵器コレジャナイ・ザー
個体識別呼称:試作一号機
まともな機動力とコレジャナイ式アームにパワーも兼ね備えた「ちゃんとしたかわロボ」
そもそもは左右独立ロングロッドと、アームそれぞれにモーター4発積みを実現しようとして軽量化を念頭に置いて設計した。
脚にも合計4つのモーターを積んでいるため、モーター上限数は12個
「正直無理くない?」と思ったが、現在モーター8個の状態での重量は2900g
あと4つのモーターもおそらく収まるというくらいまで頑張った。スッカスカである。
4本ロッド秘匿呼称:びっくりナイフ
アームに刺されたと思ったら刺されてなかった!痛くない!
相手マシンもびっくりの安全設計です。
シャコシャコせずにはいられない。そんな依存性を秘めています。
ちょっと凝っているのが、バネの収納構造です。
相手マシンに出来る限り引っ掛からないように外に出ないようにしてます。
アーム機構はいつも通りのスライダーリンクです。
今年はかなり効率がいいものが出来上がったので嬉しいです。
さすが大型機はここに悩まなくて済みます。
ボディーの構造はアームと、アームボディに直接付いている形の足ユニットが二個付いている脚-ボディ-脚ユニットがシンメトリーに配置されています。ちょっとスマートな感じに作れたのがお気に入りです。
画像左にリンク機構が見えますが、これはロングロッド用の復帰機構と、立ちスタート用を兼ねたものです。今年使うかは未定です。
カムリンクが優秀なのと、効率を上げるためのヘッケン化をしました。
カムヘッケンを作ってみたことで、スライダーヘッケンにもちゃんといいところがあるなと感じましたね。もちろんこのこもいい子です。
軽量化を前提にしたたため構造的に雑な部分があるので、次で改修します。
ただオイルダンパーの可動域が微妙なので、これも改修ポイントです。
妙に長い横板はカウンターを兼ねています。
これが一番軽いと思います()
足裏は変成シリコン接着剤を型を取って固めています。
使用感は…硬いです。グリップもないわけではないんですが、もっと柔らかいほうがいいという人は多いと思います。
自分的には、丈夫で長持ちしそうなのでこれでいいかなって思いますが。
うまくやらないと足裏が凸凹になるので、ここはノウハウだと思います。
ちなみに自分はまだ下手なので、凸凹になってしまってます。かなC
使った接着剤は セメダインスーパーXG 透明
プライマーは セメダイン MP-1000です。
プライマー塗らないとすぐ剥がれてしまいます。ガチ溶剤なので取り扱い注意ですので、使う場合お気を付けください。
接着剤はスーパーXというシリーズがあるんですが、その中でも多用途と謳っているXGを使いました。別に多用途がよかったわけではなく、機械特性の資料が載ってたので使いました。
他のでもいいかもしれませんが、スーパーXGの場合白や黒の色付きはせん断強度が低かったので、使う場合透明をお勧めします。おそらく染料が混じることで強度が落ちるのでしょう。
以上になります。
今回はかなり思い切って新設計を取り入れたので、まだ色々と粗があります。
来年に向けて近代化改修を行っていきますので、お楽しみに。
では最後に…
株式会社3DGripsは今日で設立1年を迎えました!!
今後とも宜しくお願い致します。!!